University team to build a self-driving Car for city streets
A team of Cornell University students and faculty will receive up to $1 million in Defense Advanced Research Projects Agency (DARPA) funding to develop a vehicle capable of driving itself on city streets. The vehicle will compete in the DARPA Urban Challenge in November 2007.
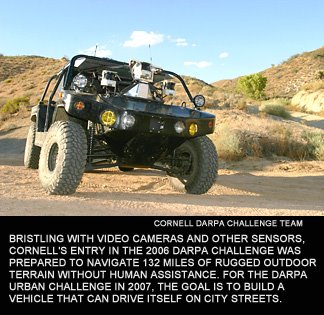
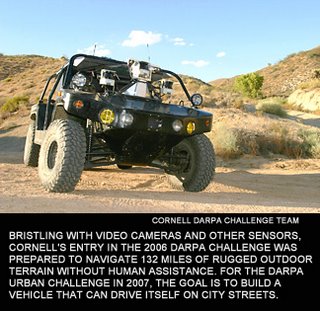 Last year, the goal was to build a vehicle that could drive itself, without human intervention, across 132 miles of desert with unpaved roads, ditches, berms, sandy ground, standing water, rocks and boulders, narrow underpasses, construction equipment, concrete safety rails, power line towers, barbed wire fences and cattle guards.
Last year, the goal was to build a vehicle that could drive itself, without human intervention, across 132 miles of desert with unpaved roads, ditches, berms, sandy ground, standing water, rocks and boulders, narrow underpasses, construction equipment, concrete safety rails, power line towers, barbed wire fences and cattle guards.
Compared with this year, that was a piece of cake.
The new DARPA (Defense Advanced Research Projects Agency) Urban Challenge, leading up to a competition in November 2007, is to build a car that can drive itself on city streets, obeying traffic laws, stopping at stop signs, navigating traffic circles and dealing with other vehicles.
DARPA will give a team of Cornell students and faculty up to $1 million to try. Based on an initial proposal from the team, DARPA has selected Cornell as one of 11 "Track A" participants (out of more than 60 applicants) that will receive advance funding to develop their vehicles. Other teams are expected to compete in the final event -- a competition that will require autonomous ground vehicles to execute simulated military supply missions safely and effectively while in a mock city environment. DARPA is the research and development agency for the U.S. Department of Defense. Its long-range goal in sponsoring the challenges is to develop robotic vehicles that can carry out dangerous missions without endangering humans.
"Technologically it's a leap above the other [challenge]," said Ephrahim Garcia, associate professor of mechanical and aerospace engineering (M&AE) and one of four faculty members advising the team. "If you look at the literature on robotic vehicles, it mostly stops at static obstacle avoidance. The specification for this is the California Driving Manual. Think of every detail you do when you drive, and imagine how you would program that."
The team has settled on a Chevrolet Tahoe SUV as the basic vehicle, but "the key really is the smarts on board," said Mark Campbell, associate professor of M&AE and another faculty adviser. A big part of the challenge, he says, is collecting an immense amount of information from video cameras, radar, lidar (light detection and ranging) and GPS (global positioning satellite) signals, and processing that information quickly into a perceptive model of the environment around the vehicle.
"You have a large object coming into view. How do you tell it's a car or a bus and not a rock?" Campbell said. "How big is it, how fast is it moving, what could it possibly do when you get close? You build a probabilistic model and then you can plan your actions." A probabilistic model, he explained, will not only show what's happening but also make predictions about what will happen next. That information then passes to an artificial intelligence system that will send commands to the vehicle's controls.
The DARPA funding will make a big difference, Garcia said, noting that last year's team had to build everything from scratch. "It was an amazing feat that these kids in a matter of weeks were able to automate a vehicle," he said. The money, he explained, will allow the team to contract out the physical construction of such things as the vehicle steering and brake controls, allowing the students to concentrate on sensor fusion and programming the vehicle's intelligence.
The Cornell team of 15 students includes six members of the team that suffered a frustrating defeat in the last DARPA challenge. Although their car had performed exceptionally well in qualifying events, a software weakness combined with an unforeseen action by one of the competition umpires knocked it out of the final competition after only nine miles.
But "Last year we had technically one of the best vehicles there," said Brian Schimpf '06, one of the leaders of the new team, who delayed his graduation in order to participate in this year's competition. "I think they realized that, and our proposal showed that we had done the research, that we knew what we were talking about."
"It's not often that students get a chance for redemption," Garcia said.
Dan Huttenolocher, the John P. and Rilla Neafsey Professor of Computing, Information Science and Business, is a third faculty adviser, and the team receives additional support from Bart Selman, professor of computer science, and from Mark Psiaki, professor, and Hod Lipson, assistant professor, of M&AE.
Greener Newsroom ::
Technology
Keywords: AUTONOMOUS VEHICLE, ROBOTICS, ARTIFICIAL INTELLIGENCE, MILITARY VEHICLES, DARPA CHALLENGE
 Last year, the goal was to build a vehicle that could drive itself, without human intervention, across 132 miles of desert with unpaved roads, ditches, berms, sandy ground, standing water, rocks and boulders, narrow underpasses, construction equipment, concrete safety rails, power line towers, barbed wire fences and cattle guards.
Last year, the goal was to build a vehicle that could drive itself, without human intervention, across 132 miles of desert with unpaved roads, ditches, berms, sandy ground, standing water, rocks and boulders, narrow underpasses, construction equipment, concrete safety rails, power line towers, barbed wire fences and cattle guards.Compared with this year, that was a piece of cake.
The new DARPA (Defense Advanced Research Projects Agency) Urban Challenge, leading up to a competition in November 2007, is to build a car that can drive itself on city streets, obeying traffic laws, stopping at stop signs, navigating traffic circles and dealing with other vehicles.
DARPA will give a team of Cornell students and faculty up to $1 million to try. Based on an initial proposal from the team, DARPA has selected Cornell as one of 11 "Track A" participants (out of more than 60 applicants) that will receive advance funding to develop their vehicles. Other teams are expected to compete in the final event -- a competition that will require autonomous ground vehicles to execute simulated military supply missions safely and effectively while in a mock city environment. DARPA is the research and development agency for the U.S. Department of Defense. Its long-range goal in sponsoring the challenges is to develop robotic vehicles that can carry out dangerous missions without endangering humans.
"Technologically it's a leap above the other [challenge]," said Ephrahim Garcia, associate professor of mechanical and aerospace engineering (M&AE) and one of four faculty members advising the team. "If you look at the literature on robotic vehicles, it mostly stops at static obstacle avoidance. The specification for this is the California Driving Manual. Think of every detail you do when you drive, and imagine how you would program that."
The team has settled on a Chevrolet Tahoe SUV as the basic vehicle, but "the key really is the smarts on board," said Mark Campbell, associate professor of M&AE and another faculty adviser. A big part of the challenge, he says, is collecting an immense amount of information from video cameras, radar, lidar (light detection and ranging) and GPS (global positioning satellite) signals, and processing that information quickly into a perceptive model of the environment around the vehicle.
"You have a large object coming into view. How do you tell it's a car or a bus and not a rock?" Campbell said. "How big is it, how fast is it moving, what could it possibly do when you get close? You build a probabilistic model and then you can plan your actions." A probabilistic model, he explained, will not only show what's happening but also make predictions about what will happen next. That information then passes to an artificial intelligence system that will send commands to the vehicle's controls.
The DARPA funding will make a big difference, Garcia said, noting that last year's team had to build everything from scratch. "It was an amazing feat that these kids in a matter of weeks were able to automate a vehicle," he said. The money, he explained, will allow the team to contract out the physical construction of such things as the vehicle steering and brake controls, allowing the students to concentrate on sensor fusion and programming the vehicle's intelligence.
The Cornell team of 15 students includes six members of the team that suffered a frustrating defeat in the last DARPA challenge. Although their car had performed exceptionally well in qualifying events, a software weakness combined with an unforeseen action by one of the competition umpires knocked it out of the final competition after only nine miles.
But "Last year we had technically one of the best vehicles there," said Brian Schimpf '06, one of the leaders of the new team, who delayed his graduation in order to participate in this year's competition. "I think they realized that, and our proposal showed that we had done the research, that we knew what we were talking about."
"It's not often that students get a chance for redemption," Garcia said.
Dan Huttenolocher, the John P. and Rilla Neafsey Professor of Computing, Information Science and Business, is a third faculty adviser, and the team receives additional support from Bart Selman, professor of computer science, and from Mark Psiaki, professor, and Hod Lipson, assistant professor, of M&AE.
Greener Newsroom ::
Technology
Keywords: AUTONOMOUS VEHICLE, ROBOTICS, ARTIFICIAL INTELLIGENCE, MILITARY VEHICLES, DARPA CHALLENGE





<< Home